
Автоматическое регулирование скорости скатывания отцепов
На сортировочных горках для автоматического регулирования скорости скатывания отцепов применяют две системы: АРС-ЦНИИ и АРС-ГТСС.
В системе АРС-ГТСС скорость выхода отцепа с третьей прицельной тормозной позиции
Увых = л/
у
п + 2?»/
х
((0 — !х) 1СГ * + (Дуу)
2
, (111)
где V
п
— расчетное значение скорости подхода отцепа к вагонам, находящимся на подгорочном пути,
ё» — приведенное ускорение свободного падения,
/
х
-дальность пробега отцепа,
со — удельное ходовое сопротивление отцепа,
Iх — средний уклон зоны автоматизации,
Ду
у
— изменение скорости, соответствующее времени упреждения сигнала на оттормаживание замедлителя
Скорости выхода отцепов с первой и второй тормозных позиций, осуществляющих интервальное регулирование, переменные в зависимости от средней весовой категории отцепа. При этом скорость выхода с первой тормозной позиции подбирается таким образом, чтобы на входе второй тормозной позиции получалась примерно такая же скорость. Аналогичным образом выбирается скорость выхода отцепа со второй тормозной позиции, т. е. такой, чтобы на входе третьей тормозной позиции имелась одна и та же скорость.
Длина и средняя весовая категория отцепа определяются на весомерном участке (рис. 11.5), где находится весомер В, связанный с определителем средней весовой категории ВС. В блоке задания скорости ЗС по информации о весовой категории отцепа определяется скорость выхода отцепа из первой тормозной позиции 1ТП и в виде импульсов с переменной частотой следования передается в блок сравнения С. В этот же блок поступают импульсы с частотой следования, пропорционрльной фактической скорости движения отцепа, от радиолокационного измерителя скорости РИС. ¦ На вход устройства управления УУ замедлителем поступает результирующий сигнал, в зависимости от которого устройство УУ включает или выключает замедлители 1ТП с учетом их инерционности.
По мере движения отцепа по изолированным участкам распределительной зоны горки информация о его весовой категории и длине по блокам трансляции Т передается в блок ЗС второй тормозной позиции ПТП, управление замедлителями которой выполняется аналогично. Кроме того, на ПТП поступает информация о фактической скорости движения отцепа от скоростемера РИС в блок контроляскорости КС, где сравнивается с установленной и при отклонении, превышающем допустимое, изменяет расчетную скорость выхода данного отцепа второй и третьей тормозных позиций. Если блок КС зафиксирует отклонение в одну сторону у трех из четырех очередных отцепов одной весовой категории, то изменяется скорость выхода отцепов данной весовой категории из /777.
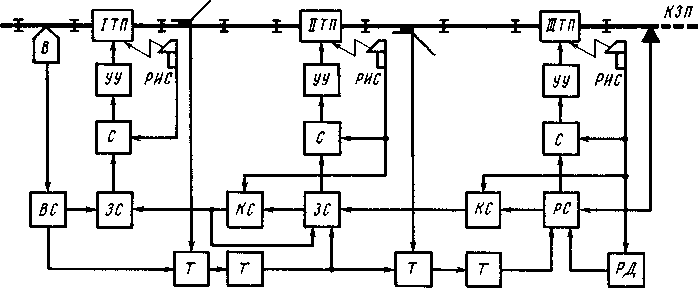
Рис 11 5 Структурная схема системы АРС ГТСС
В блоке расчета скорости РС по формуле (111) определяется скорость выхода отцепов из третьей тормозной позиции ШТП. Информация о длине свободной части пути (дальность пробега отцепа /
х
) поступает от устройств контроля заполнения путей КЗП, а фактическая скорость выхода отцепа из ШТП определяется скоростемером РИС.
Если фактическая скорость выхода отцепа из ШТП отличается от расчетной не менее допустимого значения, то на время движения отцепа по пути (50 с) в блок РС записывается длина свободной части пути, равная разности длин предыдущей свободной части пути и отцепа. По истечении 50 с в блок РС поступает информация от устройств КЗП о действительной длине свободной части пути. Если же скорость выхода отцепа из ШТП, измеренная скоростемером РИС, значительно меньше расчетной, то в блоке расчета длины РД вычисляется ожидаемая длина пробега отцепа и в течение 50 с в блок РС передается вычисленная длина свободной части пути. После окончания выдержки времени в блок РС вновь поступает информация от устройств КЗП.
В системе АРС-ГТСС изменение ускорения движения отцепов не измеряется, но учитывается наличием обратных связей, корректирующих степень торможения. Система построена на полупроводниковых элементах и может работать независимо от других устройств горочной автоматики.
В системе АРС-ЦНИИ вторая тормозная позиция осуществляет интервально-прицельное торможение, благодаря чему появилась возможность учитывать наличие движущихся отцепов во всей зоне ниже второй тормозной позиции, а также особенности каждого маршрута и остановку отцепов на замедлителях третьей тормозной позиции.
При этом снижается необходимая мощность и стоимость парковых тормозных средств.
Система АРС-ЦНИИ работает совместно с устройствами ГАЦ и построена на бесконтактных элементах, герконовых и электромагнитных реле. Ускорение движения отцепа, его длина и весовая категория определяются на измерительном участке за вершиной горки (рис. 11.6), где установлены весомер В и путевые датчики П1, П2, ПЗ, связанные с устройством измерения ускорения ИЗУ и определителем весовой категории и длины п
в
ОВКД-
Измеренные данные поступают в устройство управления ІТП УУ1, где вычисляется скорость выхода отцепа с учетом интервального разделения отцепов на стрелках и замедлителях. Для этого предусмотрены устройства интервального регулирования ИР, которые корректируют расчетные скорости выхода отцепов из тормозных позиций. По информации, поступающей в устройства ИР из системы ГАЦ, логически анализируется ситуация на горке и определяется одна из установленных скоростей выхода отцепа из тормозной позиции. Скорость, выбранная по условиям обеспечения интервала между отцепами, сравнивается с расчетной и из них выбирается оптимальная. В устройстве управления УУ1 сравниваются заданная и фактическая, измеренная скоростемером РИС, скорости и в зависимости от их разности осуществляется управление замедлителями /777.
Накопителями Н1 и Н2 информация об ускорении, весовой категории и длине отцепа транслируется по маршруту его скатывания. Эта информация из накопителей поступает в устройство вычисления скорости-выхода отцепа ВСВ из ИТП и ШТП. В устройство ВСВ также поступает информация о длине свободной части подгорочных путей от устройств КЗП, причем учитывается длина предыдущего отцепа, движущегося на этот же путь, а также информация о силе и направлении ветра от устройств определения сопротивления среды О С С.
Скорость выхода отцепа из второй тормозной позиции ПТП
и
вых
= V»* -І» 2г»(92а°+ 20п) 10~
5
— 2а»I + 2
ё
«1г
т
К ,
где а» — ускорение отцепа, вычисленное по его ускорению, измеренному в ИЗУ с поправкой на уклон,
I — дальность пробега отцепа,
/г
т
— величина, найденная из условия наименьшей допустимой скорости выхода из ПТП хорошего бегуна,
К- коэффициент, учитывающий долю /г
т
ШТП, для обеспечения необходимого интервала между отцепами в стрелочной зоне (для плохих бегунов К= 0, а для хороших — /С= 1)
Результаты вычисления скорости выхода отцепа из ВСВ поступают в устройство управления ПТП УУ2 и транслируются по маршруту следования отцепа в устройство управления ШТП УУЗ, на которой окончательно корректируется прицельное торможение.
В основе систем АРС-ГТСС и АРС-ЦНИИ лежит принцип автоматического регулирования скорости движения отцепов вагонными замедлителями с обеспечением интервалов между отцепами в распределительной зоне горки и требуемой дальности пробега отцеповпри безопасной скорости их соударения на подгорочных путях. В обеих системах предусмотрена возможность изменения заданных скоростей выхода из тормозных позиций.
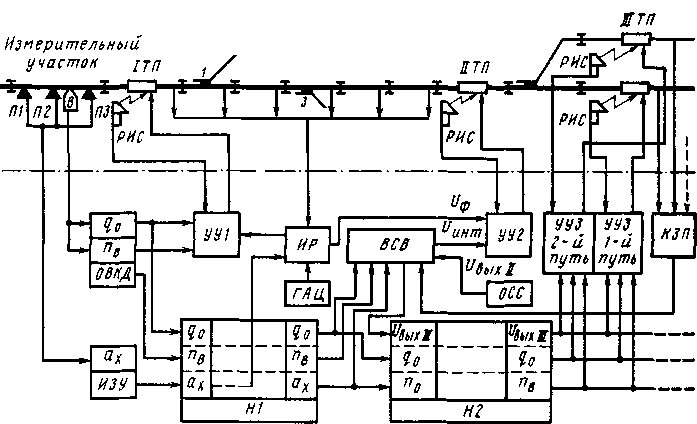
Рис 1 1 Ь Стркгурная схема системы АРС-ЦНИИ
Длина свободной части путей подгорочного парка измеряется устройствами контроля заполнения путей /(3/7. Для этого каждый путь на протяжении 375 м делят на 15 изолированных участков по 25 м каждый. Все рельсовые цепи питаются от общей питающей магистрали напряжением 220 В. К этой же магистрали через контакты путевых реле подключены первичные обмотки измерительных трансформаторов, вторичные обмотки которых соединены последовательно и образуют измерительную магистраль (см. рис. 3.18).
Для исключения изолирующих стыков, обладающих низкой надежностью, разработано устройство КЗП с индуктивными датчиками. В этом устройстве к крайним рельсам двух соседних путей через трансформатор подключается питающее напряжение, а на средних рельсовых нитях через каждые 25-50 м устанавливают индуктивные датчики. На дальнем конце путей рельсы соединяют между собой перемычкой.
При свободности обоих путей ток проходит по цепи через внешние рельсы и перемычку, во внутренних рельсовых нитях ток не протекает и э. д. с. в датчиках не наводится. При вступлении вагона на путь ток протекает через его колесные пары во внутренние рельсы и в катушках датчиков наводится э. д. с. К датчикам подключают обмотки реле, а их контакты включены в измерительную цепь, напряжение на выходе которой пропорционально длине свободной части пути.
Автоматизированная система управления расформированием составов на горке АСУ-РСГ создана на основе современных средств вычислительной техники и применения математических методов.
Эта система исключает такие недостатки существующих систем, как практически неперестраиваемый алгоритм реализации функций управления, неунифицированную конструктивную и элементную базу, ограниченные возможности автоматического составления графика исполненной работы. Система позволяет автоматизировать основные этапы процесса расформирования составов: управление горочным локомотивом, стрелочными приводами и замедлителями, причем система легко перестраивается, учитывает большое число факторов, позволяет печатать протокол в процессе роспуска состава. Индивидуальные особенности горки не требуют изменений конструктивного характера в системе.
Система АСУ РСГ регулирует скорость надвига и роспуска состава, скорость и управление маршрутами движения отцепов с горки, обменивается информацией с АСУ сортировочной станцией С АСУ СС). Использование в системе видеотерминалов позволяет оператору иметь полную информацию о ходе технологического процесса, причем информация может выдаваться управляющим вычислительным комплексом (УВК) автоматически и по запросу оператора. В системе имеются два режима работы: автоматический и оперативный (ручной), выполняемый оператором. Основу системы составляет УВК на базе управляющей ЭВМ типа СМ-2.
Скорость роспуска в системе АСУ РСГ регулируется подачей из УВК на исполнительные органы команд, формируемых в результате предварительного математического моделирования процесса на основе данных о составе, полученных из АСУ СС, с их корректировкой по ситуации на спускной части и подгорочных путях. Скорость движения отцепов регулируется на тормозных позициях. Скорость выхода отцепа из каждой тормозной позиции рассчитывается УВК на основе моделирования роспуска и исходных данных об отцепе с учетом положения данного отцепа относительно предыдущего и последующего. Маршрутами движения отцепов управляет УВК, связанный со схемами стрелочных электроприводов, согласно входному макету состава, поступающего из АСУ-СС. Управление маршрутами может быть программным и маршрутным.
Систему АСУ-РСГ разрабатывают в рамках сотрудничества социалистических стран. Ведутся работы по созданию системы автоматизации расформирования составов на базе комплекса технических средств локальных информационно-управляющих систем (КТС ЛИУС-2), представляющего собой четвертое поколение управляющих средств, основанное на
г
микропроцессорной технике.
За рубежом наиболее крупные сортировочные горки оборудуют современными ЭВМ для автоматизации процесса роспуска составов. Так, в ФРГ разработана микровычислительная система МИКОР управления маневровой работой, которая содержит специализированную микроЭВМ для управления роспуском вагонов. Система обеспечивает стабильную скорость роспуска, равную 1,5±0,12 м/с.
Фирмой Сименс для Финских государственных железных дорог разработана система автоматического управления роспуском вагонов с управляющей ЭВМ. Система содержит фотоэлектрические и радиолокационные датчики измерения скорости движения отцепов.
В системе автоматического регулирования скорости скатывания отцепов с горба сортировочной горки избыточная скорость гасится тормозными устройствами. Требуемая скорость выхода отцепа из тормозной позиции (в зависимости от заполнения пути) задается счетно-решающим устройством, истинная скорость отцепов контролируется радиолокационным скоростемером. При совпадении этих скоростей срабатывает специальное устройство и отцеп растормаживается. Радиолокационные скоростемеры используют также в системе автоматического задания скорости роспуска (надвига), здесь сравнением скоростей состава и отдельного отцепа определяется момент отрыва отцепа от состава.
Принцип работы скоростемера основан на эффекте Допплера. Сигнал генератора Г /
0
, излучаемый антенной измерителя А
прд
, отражается от движущегося отцепа (рис. 11.7) с частотой /о±/до, она отличается от /о на величину, пропорциональную скорости отцепа,
1 до = (2и/Л)со5 уо,
где и — скорость движения отцепа, м/с,
1//
0
-длина волны излучаемого сигнала, м,
V — угол между направлениями движения отцепа и максимальным излучением
Отраженный сигнал принимается антенной А
мр
„ и поступает в смеситель См, на другой вход которого через ответвитель О подается сигнал от генератора Г, в результате выделяется сигнал допплеровской частоты /ц
0
. После усиления сигнал в преобразователе П преобразуется в напряжение постоянного тока, пропорциональное скорости отцепа.
Находятся в эксплуатации два основных типа радиолокационных измерителей скорости ЭС ЦНИИ и РЛС ЦНИИ.
Скоростемером ЭС ЦНИИ измеряют скорость от 5 до 20 км/ч с погрешностью не более 4% на участке длиной 30 м. Частота /о= 9404 МГц, приращение допплеровской частоты 17 Гц на единицу измерения скорости (км/ч). Диаграмма направленности по половинной мощности в горизонтальной плоскости 0
Г
= 1,6°, в вертикальной — 0
В
= 60°. Скоростемер содержит блок высокой частоты с генерирующей секцией (клистрон К-19), смесительной (диод ДК-07), приемной и передающей щелевой антеннами; блок низкой частоты с усилителем допплеровского сигнала и измерителем частоты, триггером, дифференцирующей И интегрирующей цепями. Скоростемер устанавливают внутри колеи.
![]()
Скоростемер РЛС ЦНИИ обеспечивает непрерывное измерение скорости от 3 до 25 км/ч с погрешностью не более 3% при интенсивности торможения до 2 м/с
2
, fo= 37,5 ГГц. Приращение допплеровской частоты 70 Гц на единицу измерения скорости (км/ч) Диаграмма направленности по половинной мощности в вертикальной и горизонтальной плоскостях по 4° Скоростемер содержит (рис. 11.8)»
напольное устройство, в которое входит датчик допплеровского сигнала ДДС, он выполнен в виде блока СВЧ и блока питания БПД с усилителем допплеровской частоты УДЧ ДДС устанавливают перед тормозной позицией на расстоянии 5-5,5 м от первого изолирующего стыка и 2-2,2 м от оси пути, станционное устройство, в которое входят блоки измерительного преобразователя скоростемера ИПС, питания БП1 и феррорезонанс-ный стабилизатор напряжения ФС;
![]()
переносное контрольно-измерительное устройство КИУ для Настройки и контроля работы ДДС.
Генератор КС мощностью 10 мВт и частотой 37,5 ГГц выдает сиінал в антенну А2, часть мощности через щелевой мост М передается в детекторную секцию ДС, куда через приемную антенну А1 поступает сигнал, отраженный от движущегося вагона. В качестве передающей и приемной айтенн применены рупорные антенны с диэлектрическими линзами Коэффициент усиления блока усилителя допплеровской частоты УДЧ до 10
5
при ширине полосы от 200 до 2000 Гц 12
ЭФФЕКТИВНОСТЬ СИСТЕМ ЖЕЛЕЗНОДОРОЖНОЙ АВТОМАТИКИ И ТЕЛЕМЕХАНИКИ
⇐
Автоматическое задание скорости роспуска составов и телеуправление горочным локомотивом
|
Автоматика, телемеханика и связь на железнодорожном транспорте
|
Общие положения
⇒