
Токоприемник Т-5М1 (П-5)
Назначение и технические данные. Токоприемник Т-5М1 (П-5) служит для осуществления подвижного электрического соединения между контактным проводом и электрическими цепями электровоза. Технические данные токоприемника Т-5М1 (П-5) следующие:
Номинальное напряжение, В……………… 3000
Продолжительно допустимый ток, А:
при стоянке………………….. 300
при движении………………….. 2200
Наибольшая скорость движения, км/ч…………. 120
Время подъема токоприемника от сложенного положения до наибольшей рабочей высоты при номинальном давлении сжатого воздуха, с……………………. 7-10
Время опускания токоприемника от наибольшей рабочей высоты до сложенного положения при номинальном давлении сжатого —
воздуха, с…………………….3,5-6,0
Диапазон рабочей высоты, мм…………….. 400-1900
Наибольшая высота подъема, мм……………. 2100
Статическое нажатие на контактный провод в диапазоне рабочей высоты, Н:
активное (при подъеме)……………… 100
пассивное (при опускании)…………….. 130
Ход каретки, мм………….»………. 50
Разница между наибольшим и наименьшим нажатиями при одностороннем движении токоприемника в диапазоне рабочей высоты, Н, не более……»……;……….. 15
Опускающая сила в диапазоне рабочей высоты, Н, не менее . . . 200
Наименьшее давление сжатого воздуха для нормальной работы пневматического привода, кПа……………. 350
Начальное давление сжатого воздуха для испытания пневматичес-го привода на герметичность, кПа………….. 675
Напряжение переменного тока частотой 50 Гц для испытания изоляции (на электровозе) в течение 1 мин, В………. 12000
Масса, кг……………………… 269
Конструкция. Токоприемник состоит из основания 7 (рис. 53) нижних 6 и верхних 3 рам, полозов 2, кареток 1, подъемных пружин 9, пневматического привода 4 с опускающими пружинами, редукционного устройства 6?.
Основание токоприемника сварено из швеллерной стали и угольников. На нем установлены цилиндр пневматического привода и редукционное устройство. Нижние рамы, выполненные из съемных конусных труб и вала, укреплены в основании. Верхние в 7

Рис. 53. Токоприемник Т-5М1 (П-5)
рамы, представляющие конструкцию из тонкостенных труб, шар-нирно соединены с нижними рамами и несут на себе клещеобраз-ного вида каретки, на которых укреплены два полоза.
Токоприемник поднимается при подаче в цилиндр 4 (рис. 54) привода сжатого воздуха. Поршень 5 сжимает спускающие пружины 3, расположенные в цилиндре, и подъемные пружины 9 (см. рис. 53) срабатывают. Шарнирно связанные с подъемными пружинами нижние рамы 6 поворачиваются и обеспечивают подъем верхних рам 3 совместно с каретками / и полозами 2. Синхронизация поворота валов нижних рам обеспечивается тягами 5, которые шарнирно укреплены в ушках валов нижних рам. Подъемные пружины защищены от попадания снега стеклопластиковы-ми кожухами 10.
В рабочем диапазоне высоты подъема полозов токоприемника опускающие пружины. 3, находящиеся в цилиндре привода
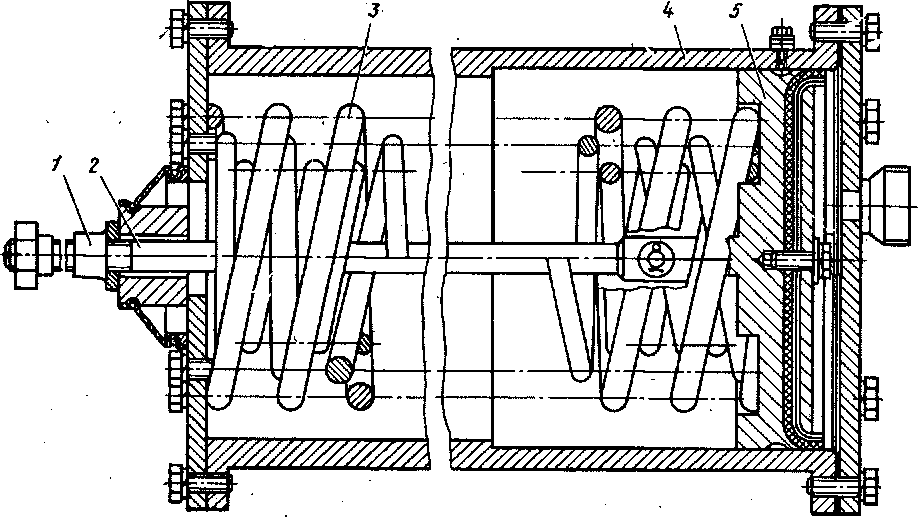
Рис. 54. Привод токоприемника
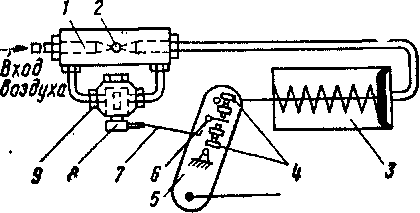
Рис. 55. Редукционное устройство
(см. рис. 54), полностью сжаты и нажатие полоза на контактный провод определяется только усилием подъемных пружин 9 (см. рис. 53). При выпуске сжатого воздуха из цилиндра опускающие пружины, разжимаясь, компенсируют действие подъемных пружин и опускают токоприемник. При разборке токоприемника сначала ослабляют подъемные пружины во избежание опасности удара при самопроизвольном подъеме.
. Каретки с полозами удерживаются в горизонтальном положении четырьмя оттяжными пружинами, которые дают возможность некоторого поворота всего верхнего узла вокруг поперечной оси токоприемника. Каждый полоз может самостоятельно поворачиваться на 5-7° относительно его продольной оси.
Контактное нажатие регулируют изменением натяжения подъемных пружин, вращая их на держателях; высоту наибольшего подъема — специальной гайкой 1 на пневматическом приводе (см. рис. 54), ограничивающей ход штока 2 поршня.
Время подъема и опускания токоприемника регулируют редукционным устройством (рис. 55), которое состоит из крана 9 и воздухораспределителя 1. Ручка 8 крана тягой 7 связана с рычагом 5 штока пневматического цилиндра 3. Изменяя болтами 4 длину тяги и угол поворота валиков 6 тяги 7, регулируют опускание токоприемника. Удлиняя тягу, ускоряют, а укорачивая тягу, замедляют опускание токоприемника. Подъем токоприемника регулируют специальным винтом воздухораспределителя.
При опущенном токоприемнике кран 9 редукционного устройства перекрыт и воздух в цилиндр 3 попадает через регулируемое отверстие 2 воздухораспределителя; токоприемник поднимается медленно. Рычаг при движении перемещает ручку крана, который открывается после прикосновения полозов к контактному проводу. При опускании токоприемника воздух из цилиндра выходит через кран. Происходит быстрое опускание токоприемника, однако, пройдя наименьшую рабочую высоту, кран перекрывается, воздух выходит через регулируемое отверстие и токоприемник плавно опускается на амортизаторы.
Снятие характеристик статического нажатия производят в соответствии с ГОСТ 12058-72. Показания динамометра / (рис. 56, а) снимают через каждые 100 мм (в диапазоне рабочей высоты) при плавном движении токоприемника в одном направлении — вверх или вниз. Токоприемник приводят в движение тросом через блок 2 и ворот 3. По результатам измерений строят график активного и пассивного нажатий. Из графика определяют силу двойного трения в шарнирах — как разницу между активным и пассивным статическим нажатием в одной точке рабочей высоты токоприемника и- разницу между наибольшим и наименьшим
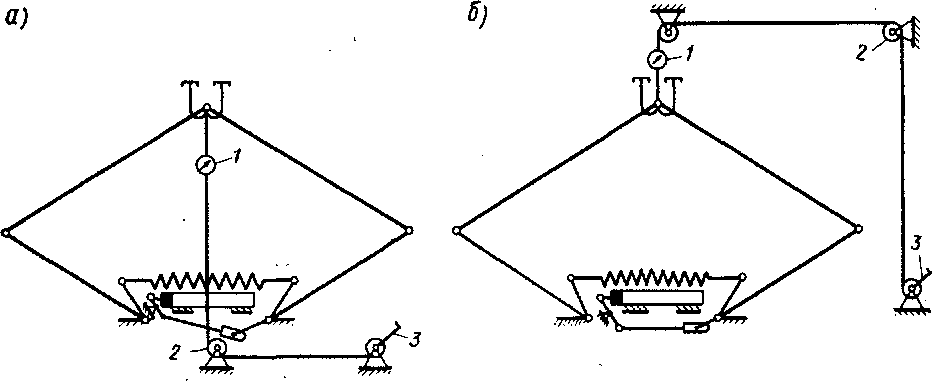
Рис. 56. Схемы снятия статической характеристики (а) и определения опускающей силы (б) токоприемника статическим нажатием при движении токоприемника в одну сторону (подъем или опускание).
Для определения опускающей силы цилиндр пневматического привода должен быть сообщен с атмосферой, показания динамометра также снимаются через каждые 100 мм (рис. 56, б).
Время подъема и опускания токоприемника определяют по секундомеру. При подъеме отсчет времени следует производить с момента начала движения токоприемника от сложенного состояния до подъема его на наибольшую рабочую высоту при номинальном давлении сжатого воздуха, а при опускании — с момента начала движения полоза с наибольшей рабочей высоты до сложенного положения.
Проверку высоты, нажатия и времени подъема и опускания токоприемника производят при пуске электровоза в эксплуатацию и при каждом техническом обслуживании ТО-3 и текущих ремонтах.