
Структура систем
Автоматическая система любой сложности состоит из объекта управления и автоматического управляющего устройства.
Объект управления — совокупность технических средств, которые нуждаются в специально организованных воздействиях для достижения поставленной цели управления. К ним относятся генераторы, двигатели, локомотивы, стрелочные приводы и т. д. С точки зрения управления объект характеризуют некоторыми величинами, совокупность которых определяет его состояние. Эти величины, их обычно называют регулируемыми, могут поддерживаться неизменными или меняться в соответствии с целями и задачами управления. Регулируемыми величинами могут являться скорость движения поезда, напряжение на выходе генератора, скорость отцепа при выходе с тормозной позиции, температура или давление в котле и т. п.
Под влиянием возмущающих воздействий (изменения нагрузки, отклонения температуры, питающих напряжений или других параметров от номинальных значений) регулируемые величины отклоняются от заданных значений. Для уменьшения или ликвидации этого явления вырабатываются управляющие воздействия, которые поступают на объект управления от автоматического управляющего устройства.
На схеме (рис. 1.1) показана автоматическая система с одной регулируемой величиной у(П- Требуемое значение регулируемой величины х(1), задаваемое на входе, называется задающим воздействием. Значение регулируемой величины у(1) может отличаться от д(0 из-за возмущающих воздействий /(1). Для ликвидации этих отклонений автоматическое управляющее устройство АУУ вырабатывает управляющее воздействие м(/), которое подается на объект управления ОУ.
В зависимости от того, как и на основе какой информации вырабатывается управляющее воздействие, автоматические системы делят на: замкнутые, или системы с обратной связью; разомкнутые, или системы без обратной связи.
В замкнутых системах- (системы автоматического регулирования) управляющее воздействие и(1) вырабатывается на основе информации об отклонении регулируемой величины у(/) от требуемого значения х(^),Т. е. н(0 является функцией рассогласования Ах(^):
![]()
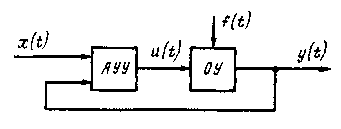
Рис. 1.1. Структурная схема автоматической системы
В этих системах сравнивается действительное значение управляемой величины y(t) с требуемым значением x(t) (рис. 1.2, а) и управление объекта осуществляется в зависимости от результатов сравнения. Операцию сравнения фактического и заданного значений выходной величины выполняет элемент сравнения ЭС, в котором вырабатывается сигнал разности Аx(t). Связь между рассогласованием и управляющим воздействием u(t) устанавливается управляющим устройством УУ. Фактическое значение регулируемой величины поступает на элемент сравнения по цепи обратной связи. Принцип обратной связи является универсальным: объектом управляют без необходимости получения информации о величине и характере возмущающего воздействия, вызвавшего отклонение регулируемой величины. Это очень важное свойство, так как в большинстве случаев имеются лишь ограниченные сведения о характеристиках этих возмущений и заранее предвидеть значения возмущений невозможно.
Примером системы с обратной связью является система автоматического регулирования скорости отцепов на тормозных позициях сортировочных горок. За объект управления принимают отцепы, регулируемой величиной является скорость их движения, а информация, на основе которой вырабатывается управляющее воздействие на замедлители тормозных позиций, формируется сравнением заданной скорости выхода отцепа с тормозной позиции с фактической.
В разомкнутых системах управляющее устройство связано с объектом управления одним каналом связи (обратная связь отсутствует). Системы с разомкнутой цепью воздействий разделяют на две группы: системы компенсации и системы программного управления.
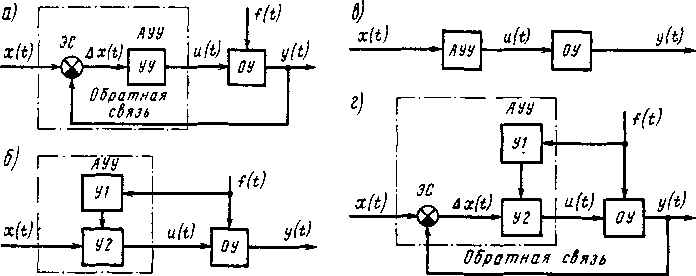
Рис. 1.2. Структурная схема систем с обратной связью (а); компенсации (б); программной (в); комбинированной (г)
В системах компенсации (рис. 1.2, б) реализуется принцип управления по возмущению, состоящий в том, что управляющее воздействие u(t) вырабатывается в зависимости от результатов измерения возмущения f(t), действующего на объект управления ОУ. Это возмущение измеряется специальным устройством У1 и далее оно преобразуется в другой части автоматического управляющего устройства АУУ У2. Таким образом, в системах компенсации управляющее устройство вырабатывается в функции задающего и возмущающего воздействий
«(О = F [x(t), f(t)]
Основной недостаток подобных систем — их избирательность к возмущениям, измерить и учесть все возмущения не представляется возможным. Обычно учитывается действие лишь наиболее существенных возмущений.
В системах программного управления (рис, 1.2, в) управляющее воздействие вырабатывается в функции задающего воздействия (программы). Примерами подобных систем могут служить различные торговые автоматы, отпускающие продукцию после получения монеты, турникеты на метрополитене, устройства включения и выключения сложных объектов (программное автоматическое устройство, осуществляющее выведение по заданной программе пусковых реостатов в цепи тяговых двигателей электроподвиж-ного состава).
Современные автоматические системы высокой точности обычно основаны на принципе комбинированного управления, сочетающего в себе принципы управления по отклонению и возмущению. При этом в автоматических системах комбинированного управления (рис. 1.2, г) наряду с замкнутыми контурами, образуемыми отрицательными обратными связями, имеются цепи компенсации основного возмущающего воздействия. Точность работы комбинированных систем выше точности систем, использующих только один из принципов управления.
В зависимости от требуемого характера изменения во времени регулируемого параметра можно выделить несколько разновидностей процесса автоматического управления. Одной из таких разновидностей является процесс автоматической стабилизации регулируемого параметра, заключающийся в автоматическом поддержании постоянства этого параметра при изменении условий протекания регулируемого процесса. Пример — система стабилизации напряжения на выходе генератора при изменении нагрузки. Другая разновидность — процесс автоматического программного регулирования^ заключающийся в автоматическом изменении регулируемого параметра по некоторому заданному закону. Пример — система программного управления станками. Третьей разновидностью процесса автоматического управления является автоматическое изменение регулируемого параметра в соответствии с изменением управляющего воздействия, закон изменения которого заранее неизвестен.
Такой процесс называют автоматическим слежением. К следящим системам относятся системы автоматической подстройки частоты генераторов. Четвертая разновидность — автоматическое обеспечение оптимального значения регулируемого параметра при изменении внешних условий протекания регулируемого процесса. Такое регулирование называют оптимальным регулированием. В качестве регулируемого параметра при этом могут выступать коэффициент полезного действия, расход электроэнергии и т. д.
Рассматривая структуры систем автоматического управления, предполагаем, что расстояние между объектом управления и управляющим устройством невелико. Если же это расстояние становится таким большим, что для его преодоления необходимо применение специальных технических средств, то система автоматики преобразуется в систему телемеханики. В системах телемеханики по сравнению с системами автоматики включаются дополнительно шифратор, дешифратор, приемник, передатчик, линия связи. Системы телемеханики, так же как и системы автоматики, делятся на замкнутые — системы телерегулирования и разомкнутые — системы телеуправления, сигнализации и телеизмерения.
⇐
Введение
|
Автоматика, телемеханика и связь на железнодорожном транспорте
|
Классификация и характеристики элементов
⇒