

Тенденции развития ВСНТ.
Транспортные средства, развивающие скорость 300… 400 км/ч и более, считают высокоскоростными. Чтобы реализовать такие скорости движения, требуются большие, чем у ЭПС существующих типов, мощности и силы тяги для преодоления резко возрастающего сопротивления движению. Так, при движении с дозвуковыми скоростями можно пренебречь сопротивлением трения качения и считать, что основное сопротивление движению на уровне земли обусловлено сопротивлением воздушной среды. Исследованиями установлено, что это сопротивление подчиняется квадратичной зависимости от скорости движения:
![]()
,
где
![]()
-коэффициент обтекаемости;
![]()
,
—
площадь поперечного сечения подвижного состава;
![]()
— скорость движения подвижного состава.
Тогда при полном использовании сипы сцепления колес с рельсами и движении с установившейся скоростью удельная сила сопротивления движению равна силе сцепления колес с рельсами:
![]()
Следовательно, для реализации высоких скоростей необходима мощность,
![]()
.
Значит, для повышения скорости движения в 2 раза требуется увеличить мощность в 8 раз. Даже если учесть значительное снижение коэффициента сцепления с ростом скорости движения, то и тогда потребуется мощность приблизительно в 6 раз больше. Например, если при движении электропоезда ЭР2 с конструкционной скоростью реализуется удельная мощность 12 кВт/т, то для достижения скорости 400 км/ч по требовалась бы удельная мощность 12 • 6 = 72 кВт/т. Полная мощность составила бы почти 62 • 103 кВт. Реализовать такие| мощности при традиционных видах тяги на железных дорогах чрезвычайно трудно но, так как с ростом скорости сила сцепления колес с рельсами быстр уменьшается. Поэтому возникла проблема создания новых видов тяги, исключающих непосредственный контакт колеса и рельса.
Основная трудность заключается в выборе наиболее надежного и экономичного вида тяги при условии полного обеспечения безопасности движения. Определяющими при этом являются два обстоятельства: насколько удачно решена проблема «подвешивания» экипажа т.е. удержания его во взвешенном состоянии при скорости движения, равной нулю (в процессе движения это называется левитационным — парением), и как будет решена проблема создания силы тяги и управления ею.
Одно из возможных направлений решения этой проблемы — создание экипажей на воздушной подушке с использованием линейного асинхронного двигателя (ЛАД) (Франция, Англия, США)
.
Однако испытания таких экипажей показали, что они обладают очень малым отношением подъемной силы, обеспечивающей их подвешивание, к лобовому сопротивлению движению; имеют низкий коэффициент полезной нагрузки; вентиляторы создают чрезвычайный шум; технически трудно решается проблема отбора мощности от силовой установки. Вследствие этих причин поезда на воздушной подушке не рассматриваются теперь как перспективные для высокоскоростного наземного транспорта (ВСНТ).
Наиболее перспективным ВСНТ, свободным от недостатков экипажей на воздушной подушке, являются поезда с магнитным подвешиванием и линейным двигателем для тяги. Известно большое число таких предложений. Наиболее известны три варианта подвешивания — на постоянных магнитах, электромагнитное и электродинамическое.
Подвешивание с использованием постоянных магнитов
основано на отталкивающем действии одноименных магнитов, один из которых рас- положен на пути, другой на экипаже. Пока еще неизвестны магниты, способные обеспечить подъем и удержание многотонного экипажа на высоте 20…30 мм от уровня пути при экономически оправданных затратах.
Электромагнитное подвешивание
может быть выполнено с использованием принципа отталкивания или притяжения электромагнитной системы. Подвешивание, основанное на принципе притяжения, является неустойчивым, так как с увеличением расстояния между электромагнитными контурами экипажа и пути сила притяжения уменьшается обратно пропорционально квадрату этого расстояния. Для обеспечения устойчивости предусматривают автоматическое регулирование высоты подвеса с помощью обратной связи в вертикальной и горизонтальной плоскостях.
При
электродинамическом подвешивании
используется противодействие отталкивающих сил, создаваемых встречными токами двух контуров, то есть принцип отталкивания. Один из контуров расположен на экипаже, другой представляет собой секцию путевого полотна, находящуюся в данный момент под движущимся экипажем. Такая система устойчива как в горизонтальном, так и в вертикальном положениях. Поскольку в линейном асинхронном двигателе обмотка статора, расположенная на экипаже не является непрерывной, а имеет конечные размеры, то в отличие от обычного асинхронного двигателя распределение магнитного потока на входе и на выходе линейного двигателя становится неоднородным. Причина этого — силовые линии магнитного поля, проходящие из одной половины магнитной цепи (статора) в другую (ротор) вне зазора. Это явление, порождающее пульсирующие краевые поля, называют
краевым эффектом.
Наличие краевого эффекта ухудшает технико-экономические показатели линейного двигателя и, в частности, снижает его к. п. д. и соs
![]()
.
Регулирование режимов работы такой системы ВСНТ, а именно изменение скорости движения экипажа и силы тяги, можно осуществить либо с помощью «жесткой» программы, задаваемой различными специально подобранными сечениями путевой шины, либо с помощью «гибкой» программы, осуществляемой изменением частоты и напряжения, подводимого к обмотке статора ЛАД по тем же принципиальным законам, что и для обычного асинхронного двигателя с вращающимся ротором. Практическое использование этих законов осложняется трудностью измерения абсолютного скольжения ЛАД. Поэтому в качестве доступного для практики критерия может быть выбран, например, минимум силы магнитного сопротивления движению экипажа или ее вертикальной составляющей.
Одной из перспективных является система ВСНТ (54), в которой используются асинхронные двигатели с накопителями энергии в цепи ротора (В. С Кулебакин, 1938 г). Электромагнитные характеристики такой системы принципиально отличаются от характеристик обычного асинхронного двигателя. В зависимости от емкости в цепи ротора им можно придать требуемую форму.
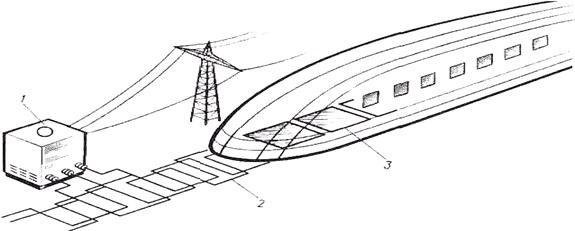
Рис. 8. Возможная принципиальная схема электроснабжения высокоскоростного железнодорожного транспорта с линейным синхронным двигателем. 1- преобразовательная подстанция; 2.- трехфазная тяговая обмотка; 3. Сверхпроводящие электромагниты.
В системе ЛАД сравнительно просто осуществить режим рекуперации. Получаемая при этом экономия электроэнергии возрастает на высоких скоростях движения. Однако при высоких скоростях движения вследствие малого зазора между обмоткой статора, расположенной на экипаже, и путевой шиной (ротором) возникают серьезные трудности в использовании ЛАД. Если увеличить зазор, резко снижается КПД и
![]()
такой системы. С другой стороны, необходимо иметь достаточный по условиям безопасного движения в кривых и при колебаниях экипажа зазор. Расположение статора ЛАД на специальной тележке с целью увеличения зазора ведет к значительному повышению массы экипажа и дополнительного силового оборудования.
От этих недостатков свободен линейный синхронный двигатель (ЛСД).