
Контроллер машиниста КМЭ-70
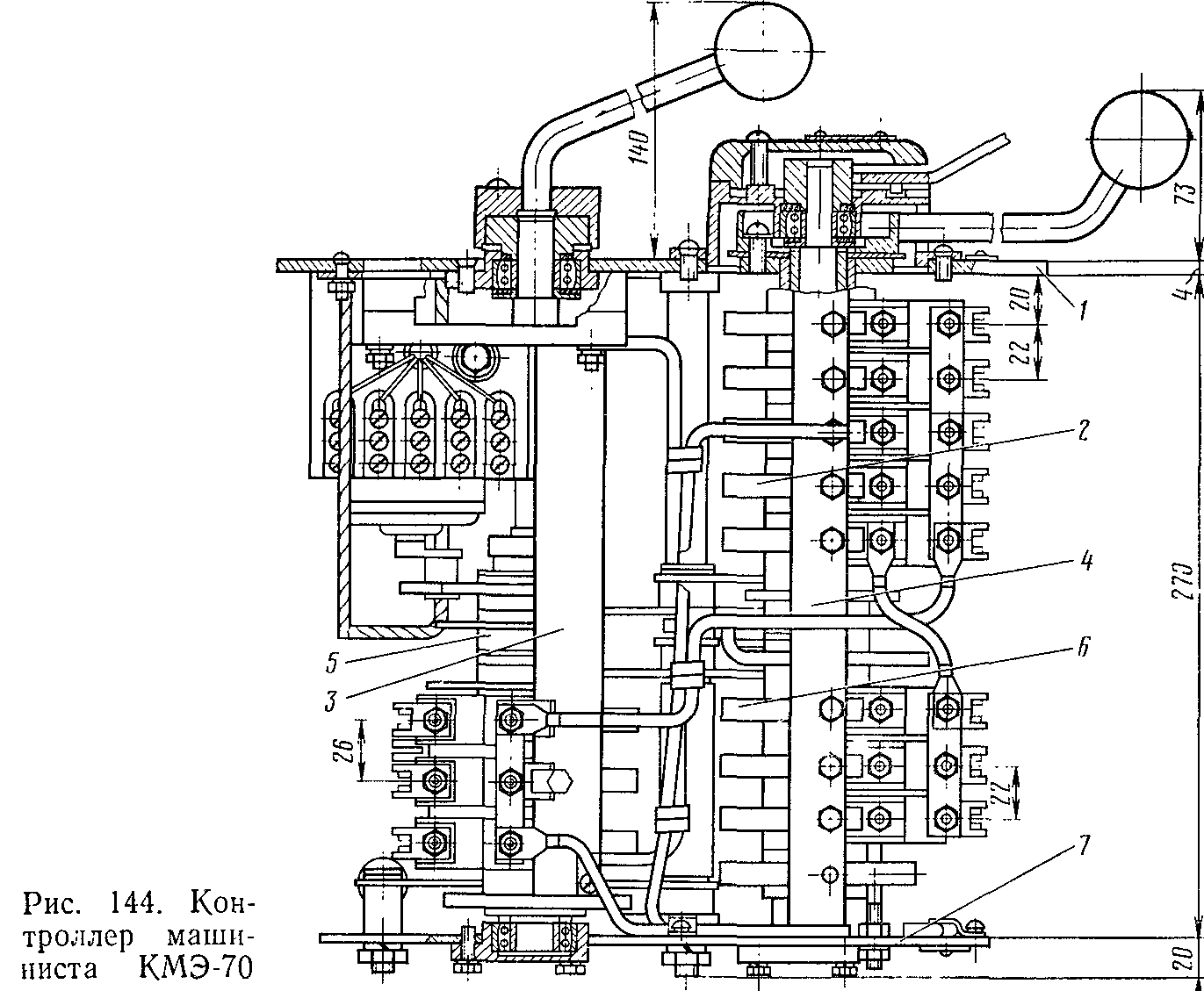
Контроллер машиниста (рис. 144) предназначен для дистанционного управления электровозом.
Технические данные
Число кулачковых контакторов:
главного переключателя……. ….. 9
реверсивного » ………….. 6
тормозного » ……….•….. 5
Масса………………….. 26 кг
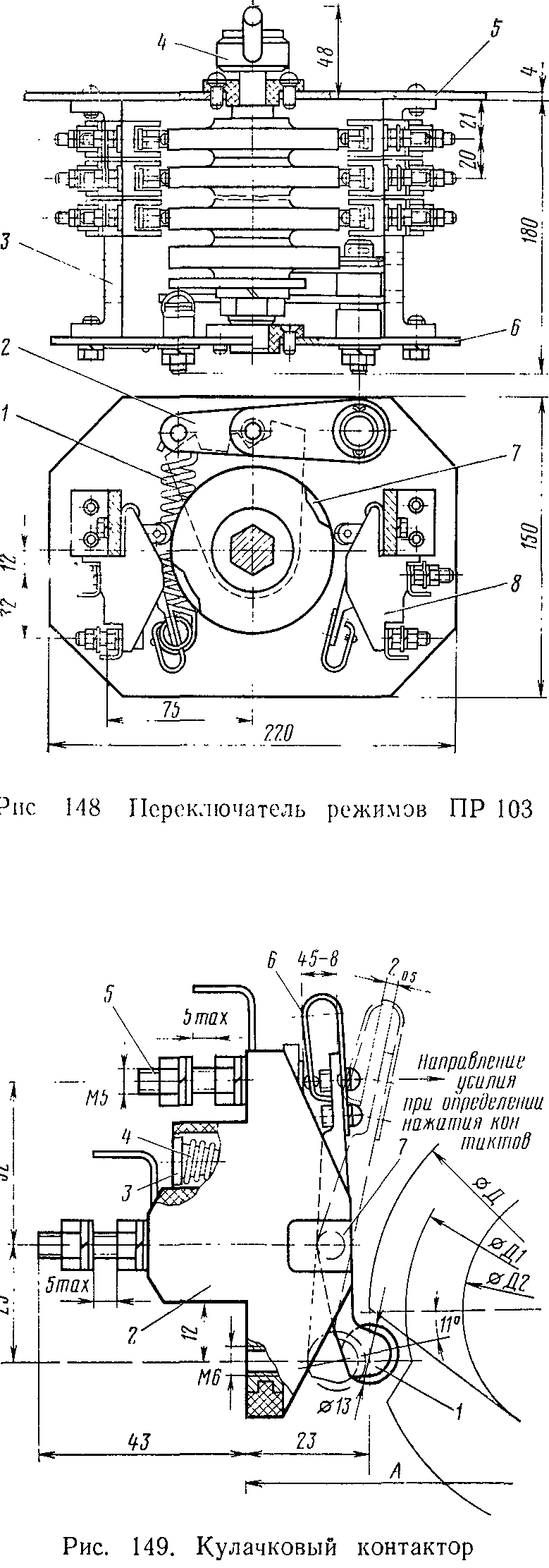
Кулачковый контактор
Напряжение номинальное …………….ПО В
Ток номинальный………………..30 А
Раствор контактов……………….5-8 мм
Провал контактов……………….1,5-2 »
Нажатие контактов………… …..Не менее
0,3 кгс
Сельсин Г/С-404
Напряжение номинальное первичное………..ПО В
Номинальная частота ………………50 Гц
Ток возбуждения………………Не более
0,28 А
Потребляемая мощность……………..Не более
8 Вт
Напряжение номинальное вторичное…………50 В
Контроллер машиниста представляет собой многопозиционный аппарат и состоит из следующих основных узлов: кулачковых валов, кулачковых контакторов, механической блокировки, переключателя тормозной силы, сельсина, являющегося датчиком напряжения для системы регулирования реостатным торможением.
Все эти узлы установлены между двумя рамами 1 н 7, соединенными рейками 3 и 4.
Группа кулачковых контакторов и соответствующий ей кулачковый вал составляет переключатель: главный 2, реверсивный 6, тормозной 5.
Для исключения ошибочных действий машиниста все переключатели сблокированы между собой при помощи механической блокировки, которая состоит из дисков, установленных на каждом валу рычагов и пружин.
Механическая блокировка обеспечивает следующий порядок взаимодействия между валами:
возможность перемещения главной рукоятки в любое положение при нахождении реверсивной рукоятки в положении ПП (Вперед и Назад), ОП1, 0112, ОПЗ и тормозной рукоятки в положение 0;
возможность перемещения тормозной рукоятки в любое положение при нахождении реверсивной рукоятки в положении ПП (Вперед и Назад) и главной рукоятки в положении 0;
возможность перемещения реверсивной рукоятки в положения ОП1, ОП2, ОПЗ при нахождении тормозной рукоятки только в положении 0, а в положение 0 при нахождении главной и тормозной рукояток в положении 0;
невозможность перемещения главной и тормозной рукояток при нахождении реверсивной рукоятки в положении 0.
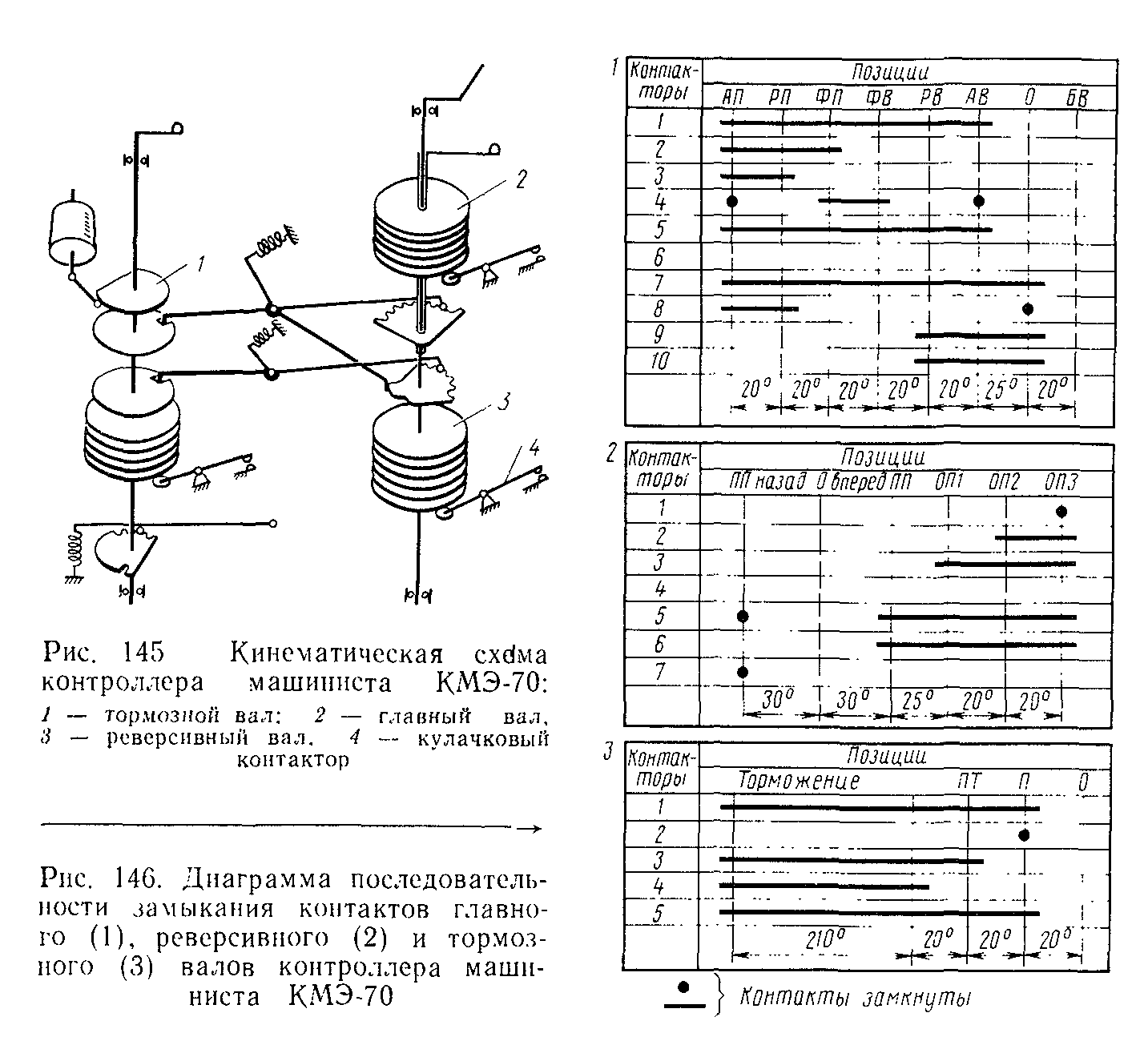
Кинематическая схема контроллера приведена на рис. 145. Порядок замыкания контактов переключателей показан на диаграмме (рис. 146).
Привод кулачковых валов всех переключателей ручной. Рукоятка реверсивного переключателя съемная.
Главный переключатель служит для управления электровозом в тяговом режиме. Вал главного переключателя расположен соос-но с валом реверсивного переключателя и имеет следующие позиции: 0 — нулевая; АВ ••- автоматическое выключение; PB —
ручное выключение; ФВ — фиксация выключения; ФП — фиксация пуска; РП — ручной пуск; АП — автоматический пуск; БВ — быстрое выключение.
Позиции О, АВ, РВ, ФВ, ФП, РП фиксированные, позиции АП и БВ с самовозвратом.
Реверсивный переключатель служит для подачи команд на изменение направления движения электровоза (Вперед или Назад). Позиции реверсивного переключателя следующие: О — пулевая; ПП Вперед — полное возбуждение; ОП1, ОП2, ОПЗ — соответственно первая, вторая, третья ступени ослабления возбуждения; ПП Назад — полное возбуждение.
Все позиции реверсивного переключателя фиксированные. Тормозной переключатель служит для управления электровозом в режиме реостатного торможения и для плавного регулирования тока возбуждения двигателей, которые работают при этом в режиме генераторов.
Позиции тормозного переключателя следующие: О — нулевая; П — подготовка цепи к Торможению; ПТ — предварительное Торможение с тормозной силой до 12 тс; Торможение.
Позиции О, П, ПТ и крайние положения зоны Торможение фиксированные. Позиции зоны Торможение не фиксированные.
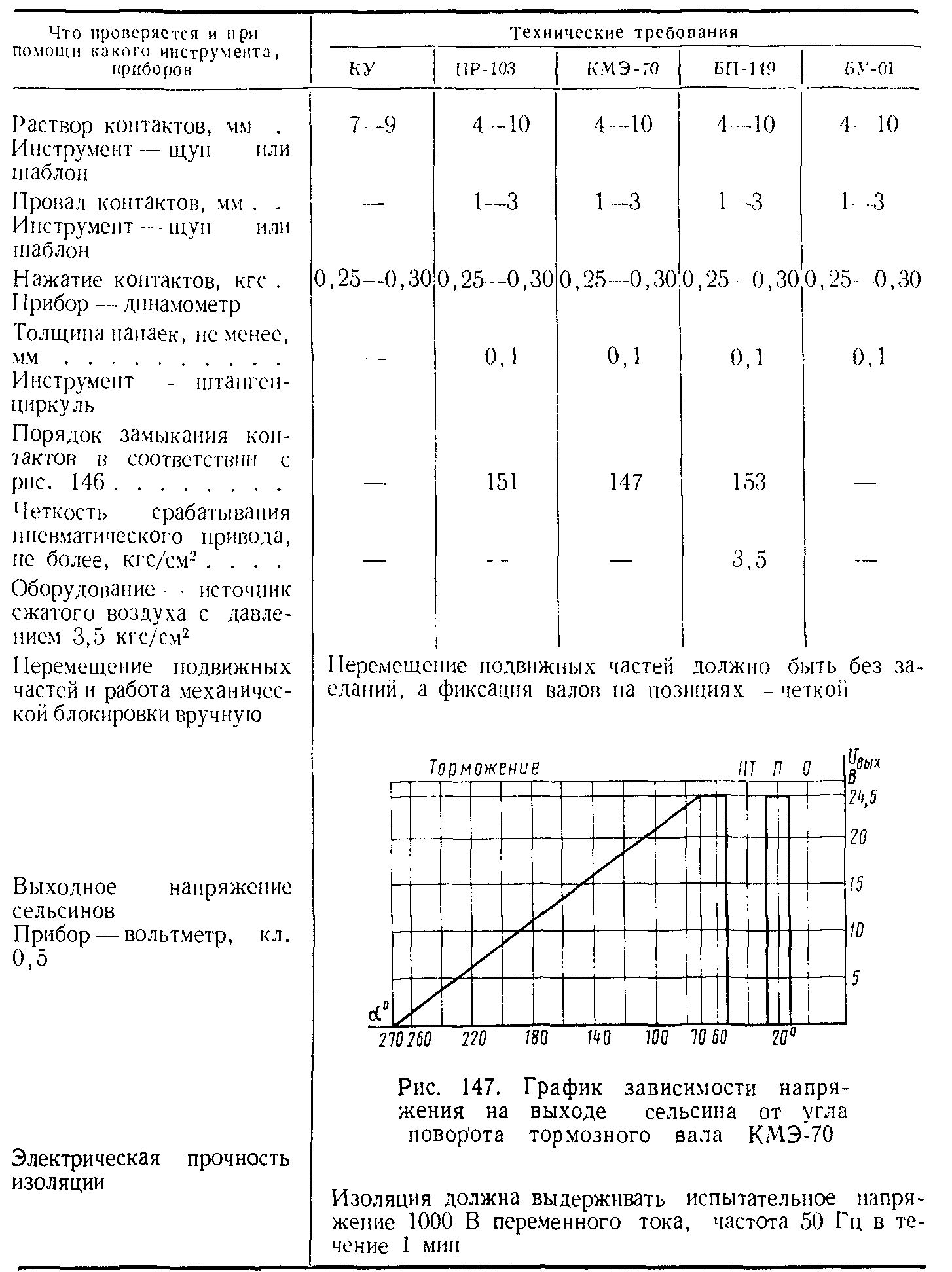
На валу тормозного переключателя установлена профильная шайба, при помощи которой производится поворот ротора сельсина.
График зависимости выходного напряжения сельсина от утла поворота тормозного вала приведен на рис. 147.
Таблица 32
На верхней раме контроллера машиниста установлен переключатель тормозной силы ПТС. Положение рукоятки ПТС определяет величину тормозной силы электровоза в тоннах.
Перечень проверок технического состояния приведен в табл. 32.