
Токоприемник Л-13У1 (Л-14М1)
Токоприемник Л-13У1 (Л-14М1) предназначен для создания электрического контакта электрооборудования подвижного состава с контактной сетью.
Токоприемник Л-13У1 оборудован полозом с угольными вставками, а Л-14М1 — с медными накладками.
Технические данные
11оминалыюе напряжение переменного тока….. 25 кВ
Длительно допустимый ток при движении……………… 500 Л
при стоянке………………. 50 »
Номинальное давление сжатого воздуха в цилиндре пневматического привода………….. 5 кгс/см2
Максимальная скорость движения электровоза …. 160 км/ч
Масса …………………. 290 кг
Токоприемник Л-14М1 допускает длительно допустимый ток до 1000 А с соответствующим увеличением статического нажатия на 2 кгс.
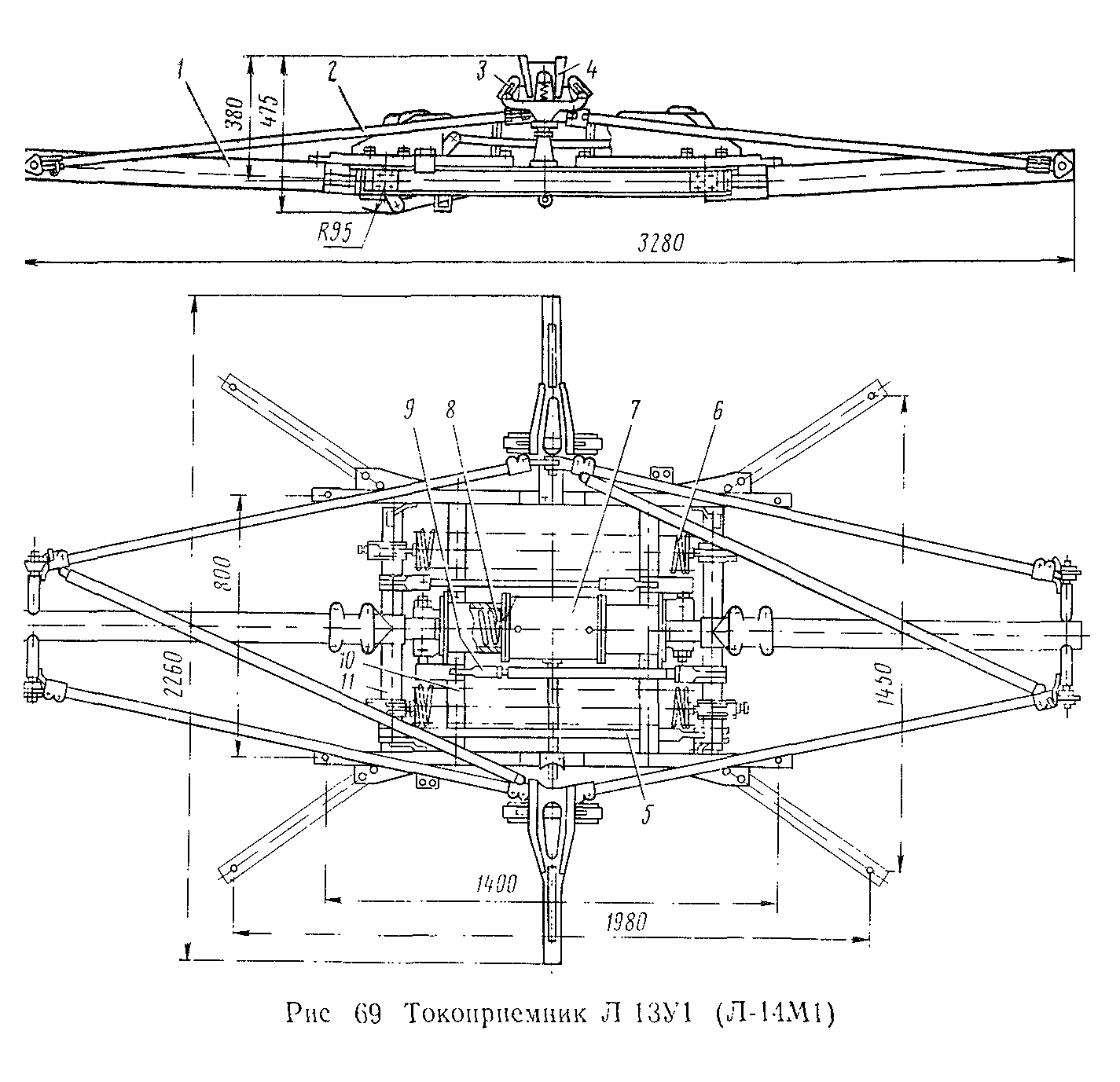
Токоприемник Л-13У1 (Л-14М1) (рис. 69) состоит из основания 10, двух нижних рам 1 с системой рычагов для шарнирного соединения с пневматическим приводом 7 и подъемными пружинами 6. Две верхние рамы 2 шарнирно соединены между собой и с нижними рамами. Рамы 2 несут каретки 3 с контактной частью токоприемника — полозом 4.
Работа токоприемника осуществляется следующим образом.
В цилиндр пневматического привода 7 подается сжатый воздух, который, действуя па поршни, сжимает пружины 8 и через тягу 9 освобождает валы 17 от усилия, создаваемого этими пружинами. Под действием пружин 6 поворачиваются валы 17 и токоприемник поднимается, обеспечивая необходимое нажатие на контактный провод в диапазоне рабочей высоты.
Для опускания токоприемника сжатый воздух из цилиндра пневматического привода 7 через клапан выбрасывается в атмосферу. Пружины 8 нейтрализуют действие пружин 6 и создают опускающее усилие, которое через систему рычагов и тяги 9 складывает токоприемник.
Полоз 4 с контактными накладками подрессорен двумя пружинами каретки 3 для обеспечения надежного контакта между полозом и контактным проводом при небольших изменениях его ВЫ»
соты. Синхронизация движения подвижных частей токоприемника достигается при помощи тяги 5, шарнирно закрепленной с валами нижних рам 1.
Кинематическая схема токоприемника приведена на рис. 70.
При работе с токоприемником, установленным на электровозе и находящимся под контактным проводом, строго соблюдайте все правила техники безопасности при работе с высоковольтной аппаратурой электроиодвижного состава.
В процессе ремонтных работ особенно осторожно производите демонтаж и монтаж подъемных пружин 6 и пружин 8 пневматического привода 7 (см. рис. 69).
Измерение характеристики статического нажатия, опускающей силы и времени подъема-опускания осуществляется следующим образом.
Закрепите динамометр к верхнему шарниру токоприемника и подайте сжатый воздух в цилиндр пневматического привода (рис. 71).
Снимите показания динамометра 1 в диапазоне рабочей высоты от 400 до 1900 мм через каждые 100 мм при плавном движспии полоза в одном направлении (вверх и вниз). При этом обеспечьте плавность движения при помощи блока 3 и ворота 2.
По результатам замеров постройте график активного (при подъеме) и пассивного (при опускании) статического нажатия и определите:
разницу между наибольшим и наименьшим нажатиями при одностороннем движении токоприемника; величину двойного трения в шарнирах как разницу между пассивным и активным статическим нажатием в одной точке рабочей вы готы.
При отклонении характеристики статического нажатия от нормы: поднимите токоприемник до максимальной рабочей высоты, для чего подайте сжатый воздух в цилиндр привода; измените предварительное натяжение подъемных пружин 1 путем вращения их совместно с держателем 2 на регулировочных штырях
3 (рис. 72); снимите характеристику статического нажатия.
Постоянство статического нажатия при одностороннем движении токоприемника достигайте изменением плеча рычага
4 подъемных пружин на максимальной рабочей высоте следующим образом: если характеристика имеет значение меньше номинального, болты 5 равномерно ввинчивайте, больше — вывинчивайте.
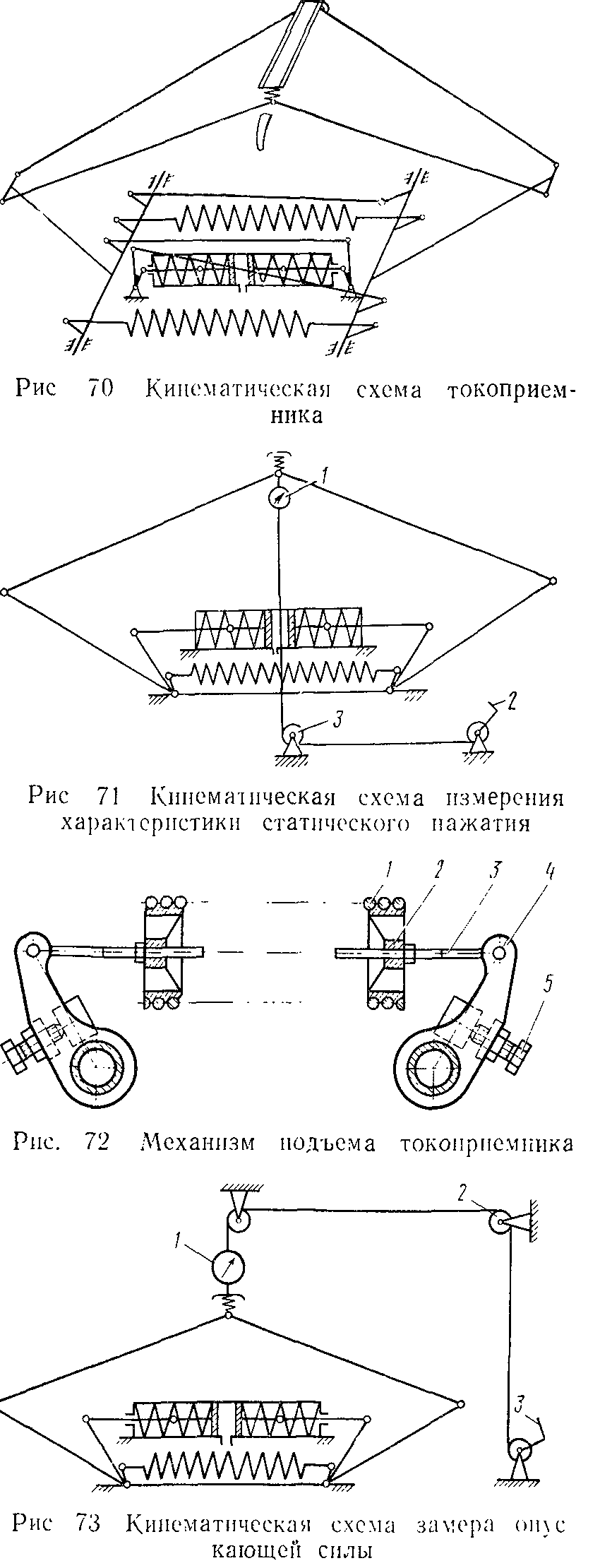
Снимите характеристику опускающей силы, представляющую зависимость силы опускания на полозе от высоты последнего, при сообщении цилиндра пневматического привода с атмосферой (рис. 73).
Снимите показания динамометра 1 в диапазоне рабочей высоты через каждые 100 мм при плавном движении полоза сверху вниз. Полоз приводите в движение при помощи троса, блока 2 и ворота 3.
Величину опускающей силы и максимальную высоту подъема регулируйте поворотом тяги пневматического привода, имеющей для этой цели шарниры с правой и левой резьбой. Перед регулировкой контргайки на тяге отпустите, после регулировки тщательно затяните.
Определите по секундомеру время подъема токоприемника, производя отсчет с момента начала движения полоза от сложенного положения до подъема его на максимальную рабочую высоту при номинальном давлении сжатого воздуха.
Отсчитывайте секундомером время опускания токоприемника с момента начала движения полоза с максимальной рабочей высоты до сложенного положения.
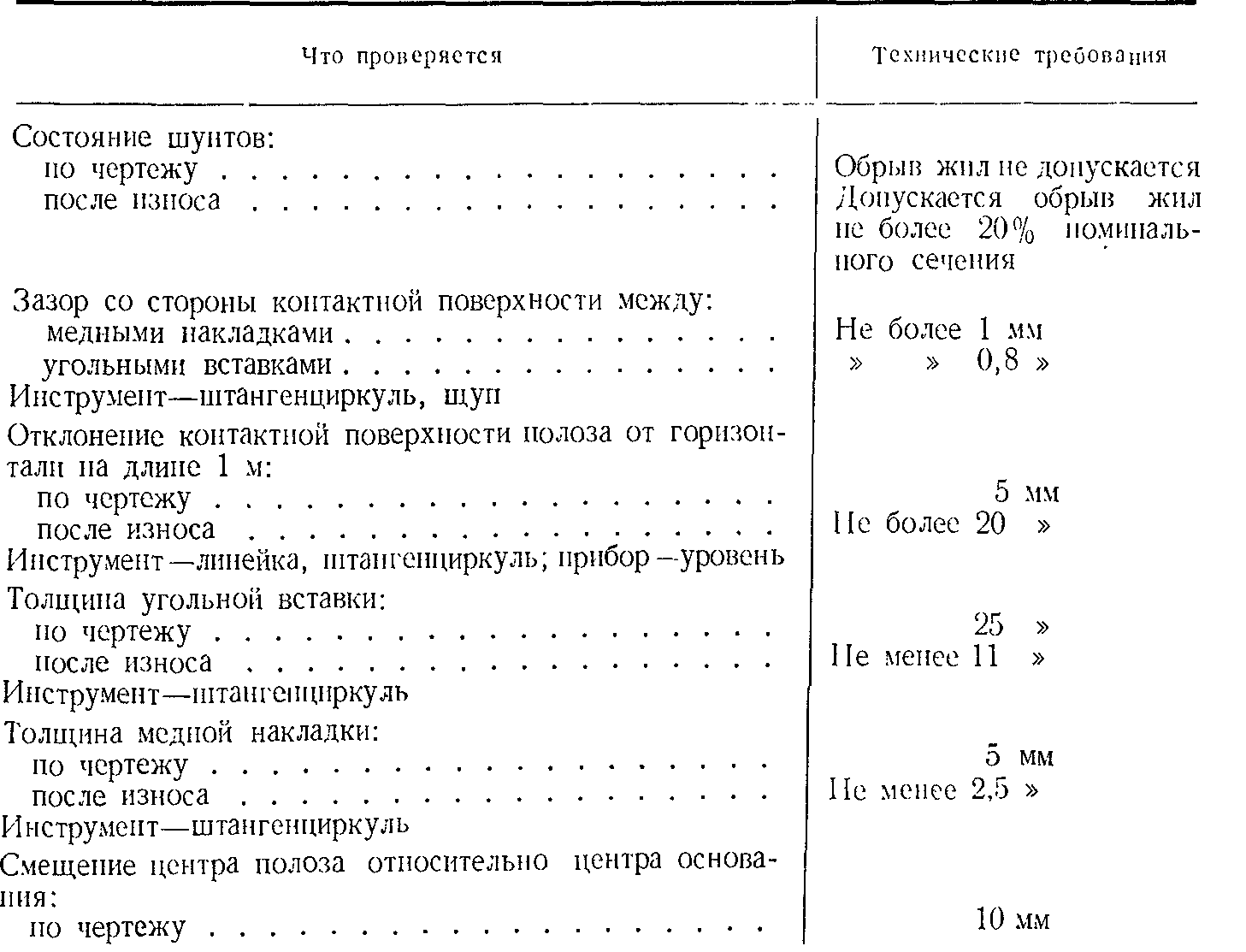
Перечень основных проверок технического состояния токоприемника приведен ниже.
Продолжение
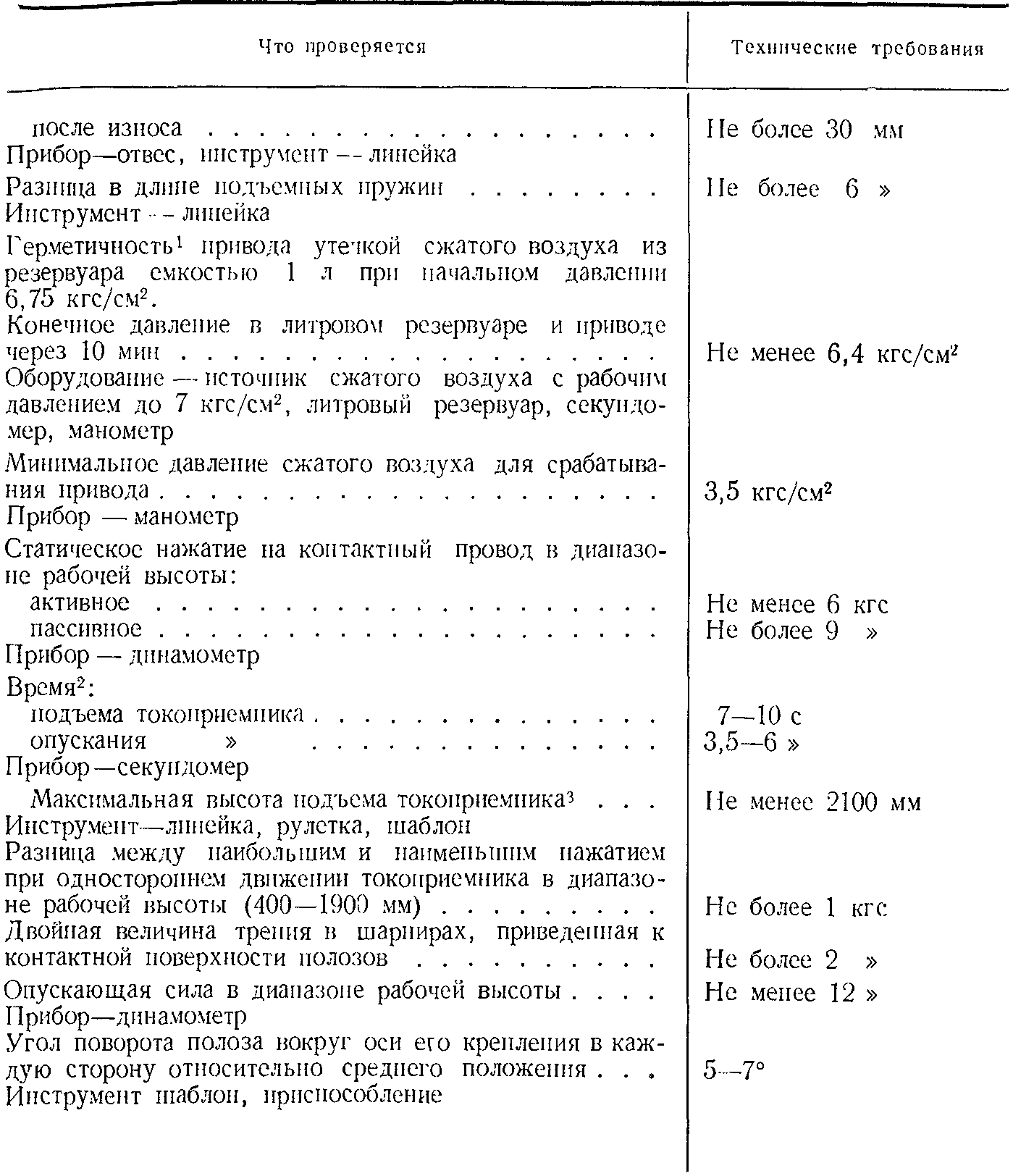
1 Герметичность привода проверяют по ГОСТ 9219-66.
2 Методика регулировки времени подъема и опускания токоприемника изложена в разделе «Электропневматические клапаны КГ1-39, КП-40, КП-41, КП-53 и КГЫОСЪ.
3 Замер расстояния производят по высоте от контактной поверхности полоза в сложенном положении токоприемника до этих же поверхностей, когда токоприемник поднят без ограничения по контактному проводу.