
Устройства технической диагностики и автоконтроля
Важнейшим условием повышения эффективности и качества работы железнодорожного транспорта является обеспечение высокой эксплуатационной надежности подвижного состава, основных элементов пути и устройств автоматики. Автоматизация контроля технического состояния (диагностики) ответственных узлов ходовых частей вагонов и локомотивов в пути следования — одно из решений задачи повышения безопасности движения поездов. Применение автоматизированных систем контроля позволяет своевременно выявить и устранить неисправности ходовых частей подвижного состава, возникающие в процессе эксплуатации, предупредить возникновение необратимых отказов, которые могут привести к авариям и крушениям, сократить затраты времени на техническое обслуживание составов, увеличить расстояния безостановочно гарантийного пробега поездов без технического обслуживания вагонов, облегчить условия и повысить производительность труда работников вагонного хозяйства. К таким системам контроля относится аппаратура обнаружения перегретых букс в проходящих поездах типа
ГТОНАБ и аппаратура обнаружения дефектов колес по кругу катания типа КРАП.
При движении поезда аппаратура КРАП выявляет дефекты колес в виде ползунов, наволакивания металла (наваров), выщербин и неравномерного (местного) износа поверхностей катания. Поскольку аппаратуры ПОНАБ и КРАП, размещаемые на одних и тех же пунктах участка следования поездов по структуре, конструкции и принципу работы имеют много общего, автономное использование этих устройств становится нерентабельным. Для повышения эффективности и качества контроля создаются автоматизированные системы комплексного контроля технического состояния подвижного состава с централизованным сбором и обработкой диагностической информации на диспетчерском пункте. Это позволяет, помимо сокращения затрат на оснащение пунктов контроля, получить экономию на обслуживании аппаратуры и организовать обмен информацией с системой АСУЖТ.
Наиболее целесообразно строить систему по варианту, в котором аппаратура линейного пункта контроля ЛПК (рис. 7.4) может работать в автономном и централизованном режимах во взаимодействии с аппаратурой других линейных пунктов и диспетчерского пункта. При этом за счет некоторой избыточности оборудования на станции появляется возможность повысить надежность работы системы, упростить перегонное оборудование ее линейных пунктов, обеспечить наиболее хорошие эксплуатационные характеристики в результате рациональной увязки с принятым технологическим процессом текущего ремонта подвижного состава. Каждый линейный пункт контроля ЛПК системы, расположенный на станциях А — Д участка безостановочного следования поездов, включает перегонную ПЧ на станционную СЧ части для каждого из направлений движения.
На базе этих частей системы организуют подсистемы дистанционного контроля различных элементов подвижного состава (буксовых узлов, колесных пар, волочащихся деталей и др,). Каждая подсистема содержит в составе перегонной части путевые измерительные преобразователи (по числу контролируемых параметров), устройства нормирования и передачи сигналов на станцию, а в составе станционной части — устройства приема и преобразования сигналов. Групповая часть станционного оборудования имеет устройства регистрации и обмена данными между линейными и центральным пунктами. Информация передается на центральный пункт по каналам дальней связи, а обрабатывается устройствами центрального диспетчерского пункта ЦДЧ. Данные контроля могут регистрироваться на каждом линейном пункте непосредственно от перегонных устройств ПЧ и при необходимости запрашиваться с диспетчерского пункта ЦДЧ, что делает систему гибкой.
При автономном режиме работы аппаратуры линейного пункта обработка информации по упрощенным алгоритмам и принятие решения о необходимости остановки поезда выполняют устройства стационарного оборудования и результаты контроля поступают наместное регистрирующее устройство во время проследования поезда через перегонный пункт контроля 1. Уровень регистрируемой информации выбирается с таким расчетом, чтобы она использовалась для указания обслуживающему персоналу мест расположения неисправностей в поезде. При централизованном режиме работы есть возможность передавать и обрабатывать информацию на центральном посту с одновременной ее регистрацией на станции. В этом случае с центрального поста по мере обработки текущей информации может поступать только команда на остановку поезда, а указания о расположении неисправностей в поезде выдаются местным регистрирующим устройством. Такой системе- присвоено условное обозначение ДИСК-БКВ-Ц: дистанционный контроль букс, колес, волочащихся деталей с централизацией обработки телеметрической информации.
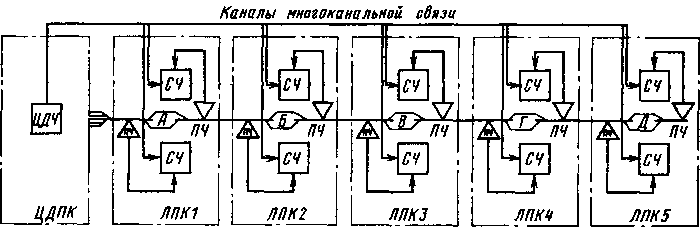
Рис 7 4. Схема, поясняющая принципы организации системы комплексного контроля технического состояния подвижного состава
В зоне контроля подвижного состава размещены три путевых измерительных преобразователя ПИП, отдельных подсистем и преобразователи команд управления ППКУ работой всей системы (рис. 7.5). Сигналы от преобразователей ПИП подсистем обнаружения перегретых букс, дефектов колес и волочащихся деталей поступают по кабелю к устройствам постового оборудования УНС, где они нормируются по длительности и амплитуде и далее передаются в линию связи с помощью многоканальной (до восьми каналов) аппаратуры передачи сообщений (АПС) на расстояние до 10 км, что соответствует максимально возможному удалению перегонного оборудования от станции.
В состав путевых преобразователей команд ППКУ входят счетчики осей и рельсовая цепь наложения (РЦН). С помощью этих преобразователей и блока управления и автоконтроля БУА осуществляется управление работой аппаратуры во время контроля поезда, определение времени проследования его по участку контроля и последующая автоматическая проверка работоспособности перегонных устройств. Команды управления и сигналы поступают от блока БУА к устройствам постовых перегонных передатчиков П для передачи с помощью АПС к станционным устройствам. В составе АПС имеются обратные каналы передачи сигналов со станции на перегон для возможности запуска проверочной программы сигналов блока БУА по команде со станции.
Станционные устройства подготавливают и регистрируют данные контроля поезда при работе системы в автономном или централизованном режиме. Данные контроля каждого поезда представляются в виде документов (цифровой печати), что удобно для восприятия обслуживающим персоналом. При этом указывается порядковый номер вагона в поезде и оси в вагоне, стороны поезда, значение контролируемого параметра и др.
Преобразование в цифровой код и подготовка информации для выдачи на регистратор Р осуществляются устройствами обработки сигналов УОС для каждой из подсистем в отдельности. Блок управления БУ анализирует текущее значение контролируемых параметров и в случае отклонения их от нормы вырабатывает команду на регистрацию данных контроля. При автономном режиме работы системы данные контроля подаются с устройств УОС в накопитель Н и далее на регистратор Р. С помощью накопителя Н согласуется скорость поступления телеметрических сигналов от перегонных устройств со скоростью вывода данных на регистратор (цифропечатающее устройство). При централизованном режиме работы системы данные контроля с накопителя поступают на передающий комплект подсистемы централизации ПКП и далее по каналам дальней связи к аппаратуре диспетчерского пункта. После обработки полученной информации на диспетчерском пункте устройством Р линейного пункта осуществляется передача и регистрация контроля данных о наличии и расположении в поезде тех или иных неисправностей.
Помимо данных, характеризующих состояние контролируемых объектов, система должна информировать обслуживающий персонал и о номере поезда и времени его проследования через пункт контроля, типе буксового узла контролируемых вагонов (на подшипниках трения, качения или скольжения), общее число вагонов в поезде. Эти
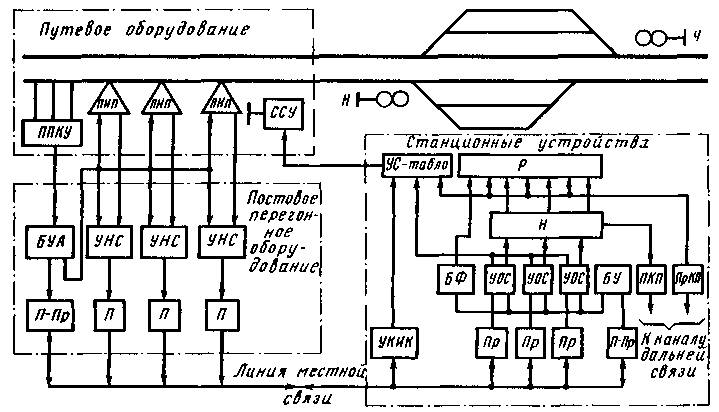
Рис. 7.5 Структурная схема аппаратуры линейного пункта контроля
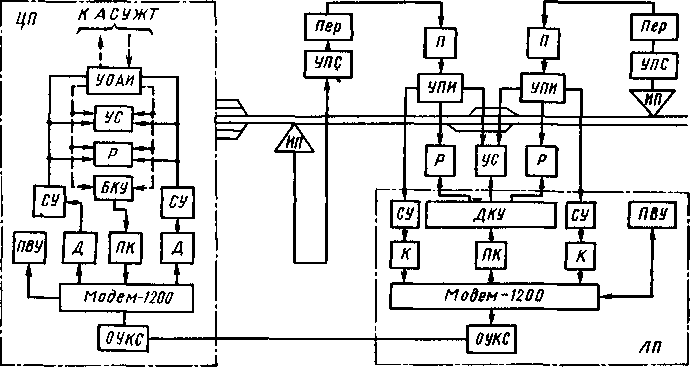
Рис 7 6-, Структурная схема подсистемы централизации и обработки информации
данные формируются блоком формирования общих данных БФ, а регистрируются регистратором Р. Устройством Р регистрируются также данные о результатах автоматической проверки работоспособности аппаратуры системы после прохода по участку контроля каждого поезда. Устройства сигнализации УС и сигнальный световой указатель ССУ по команде от станционных устройств или от устройств центрального диспетчерского пункта во время обнаружения той или иной неисправности в поезде выдают дежурному персоналу станции и локомотивной бригаде информацию о наличии в поезде неисправностей, для устранения которых необходима остановка поезда на станции или изменение режима движения поезда.
При работе аппаратуры линейного пункта в автономном режиме сигналы для управления устройствами УС и ССУ могут вырабатываться вручную или автоматически. В первом случае после расшифровки регистрируемых данных устройства УС и ССУ включаются при необходимости нажатием кнопки на пульте управления блока управления БУ. Во втором случае устройства УС и ССУ включаются автоматически от устройств УОС, но для этого последние должны содержать схемы, позволяющие анализировать значения контролируемых параметров и вырабатывать сигнал «тревоги».
Подсистема централизации и обработки информации (рис. 7.6) включает оборудование линейного и центрального пунктов контроля. Информация с линейных пунктов передается на центральный кодирующими устройствами К, с участием аппаратуры Модем-1200.
На первом этапе создания системы, когда не предусматривается автоматическая обработка информации на центральном посту, осуществляются прием и выдача данных контроля на регистратор Р центрального поста ЦП. В этом случае после дешифрации данных контроля с центрального пункта на линейный передаются блоком команд управления БКУ только команды управления на остановку поезда, а информация о расположении неисправностей в поезде выдается обслуживающему персоналу регистратором Р линейного пункта ЛП.
При автоматической обработке информации на центральном пункте данные контроля с линейного пункта поступают в устройство автоматической обработки информации УАОИ, а результаты обработки данных выдаются на линейный пункт блоком БКУ, работающим в автоматическом режиме. В этом случае регистратор Р работает в контрольном режиме, регистрируя принимаемые и передаваемые данные. При автоматической обработке информации возможна увязка аппаратуры центрального поста с подсистемами АСУЖТ для обмена данными о состоянии поездной обстановки на участке движения и оперативного планирования работ по техническому обслуживанию вагонов. При отказе в работе подсистемы централизации система автоматически переходит в режим автономной работы аппаратуры линейного пункта. Для телефонной связи между линейным и центральным пунктами применяют переговорно-вызывные устройства ПВУ. При этом предусматривают автоматическое переключение телефонного канала с режима ведения служебного разговора в режим передачи данных при заходе поезда в зону контроля перегонных устройств системы.
Подсистема централизации и обработки информации содержит: измерительные преобразователи подсистемы обнаружения неисправностей ИП устройство подготовки сообщений УПС передатчик Пер и приемник П АПС; устройство подготовки информации УПИ устройство сигнализации УС; согласующее устройство; дешифратор команд управления ДКУ», приемник команд ПК», оконечные устройства канала связи ОУКС», декодер Д; передатчик команд ПК», согласующее устройство СУ; устройство сигнализации УС.
Элементы технической диагностики и телеметрического контроля устройств железнодорожной автоматики были заложены в системе ЧДК разработки КБ ЦШ МПС и нашли применение на дистанциях сигнализации и связи. Система технической диагностики, которой пользуется диспетчер дистанции, контролирует техническое состояние эксплуатируемых устройств и их элементов, оперативно обнаруживает в них повреждения и определяет отклонения номинальных значений параметров наиболее ненадежных элементов железнодорожной автоматики. При отклонении этих параметров до предельно допустимых значений выдается сигнал тревоги. Для предупреждения отказа диспетчер в таких случаях извещает работников дистанции о необходимости срочной регулировки параметров или замены отдельных узлов й элементов в данном устройстве (рельсовой цепи, светофоре, электроприводе, источнике электропитания, схемном блоке и т. п.). Структура системы позволяет передавать информацию не только диспетчеру, но и на линейные пункты (станции) электромеханикам, а также на вычислительный центр для объективного анализа технического состояния эксплуатируемых устройств автоматики и выдачи рекомендаций по оптимальному их обслуживанию. В настоящее время разработана и на сети дорог внедряется диагностическая система «Прогноз».
⇐
Система диспетчерского контроля
|
Автоматика, телемеханика и связь на железнодорожном транспорте
|
Прибор типа ПОНАБ
⇒